|
On Nov 1, I got laid off from Tesla and am open to work! I spend my days getting back to my hobby research projects and applying to jobs. I am a Masters in Robotics Student at University of Pennsylvania, where I specialized in state estimation and perception. I did my undergrad in Mechanical Engineering from Ahmedabad University, India where I was working in Mechatronics and Controls.I worked at Tesla for close to 5 months on the C++ stack for Manipulation and Teleop. I also worked on the state estimation and system identification for Gen3 Hands and was the lead triage engineer for the Bar and Snack Bots at Robotaxi Event! My other experience was working at JPL NASA for development of the lander pose estimation algorithm for the Mars Sample Return Mission. I'm always open to engaging conversations and knowledge exchange, so feel free to drop me an email. And just a heads up, if you don't hear back from me within 48 hours, a gentle reminder would be much appreciated! |

|
|
My area of interest is in developing state estimation systems. |

|
Robotics Machine Learning Engineer, June 2024 - Nov 2024
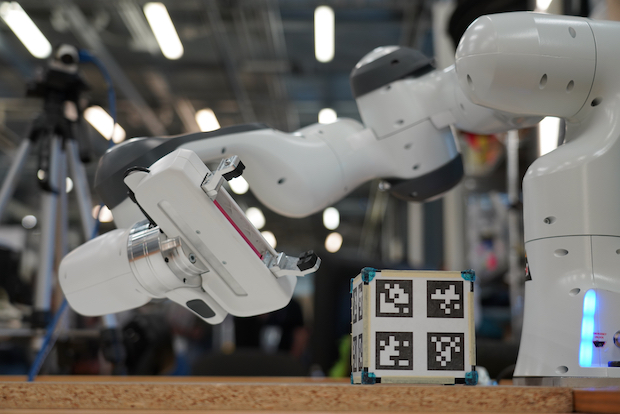
Developed joint angle estimation pipeline for Optimus Gen3 Hands. Using this data, performed system-id for Gen3 hands that was used in Robotaxi event.
Designed a Probabilistic Roadmap planner for collision-free manipulation and whole-body control for enhanced safety.
Improved C++ Manipulation Stack, supported event-critical tasks, and developed tracking and grasping algorithms for dynamic environments.
|

|
JPL Visiting Student Research Intern, May 2023 - August 2023
Joined JPL to work on Pose estimation of Lander for the Mars Sample Return
Mission. I worked on Sample Recovery Helicopters in surface navigation subsystem, being part
of Aerial Mobility Team.
Designed the system from camera calibration to Pose estimation in C++. Successfully evaluated
robustness tests under different stress conditions.
|
|
Masters Independent Study, Jan 2024 - May 2024
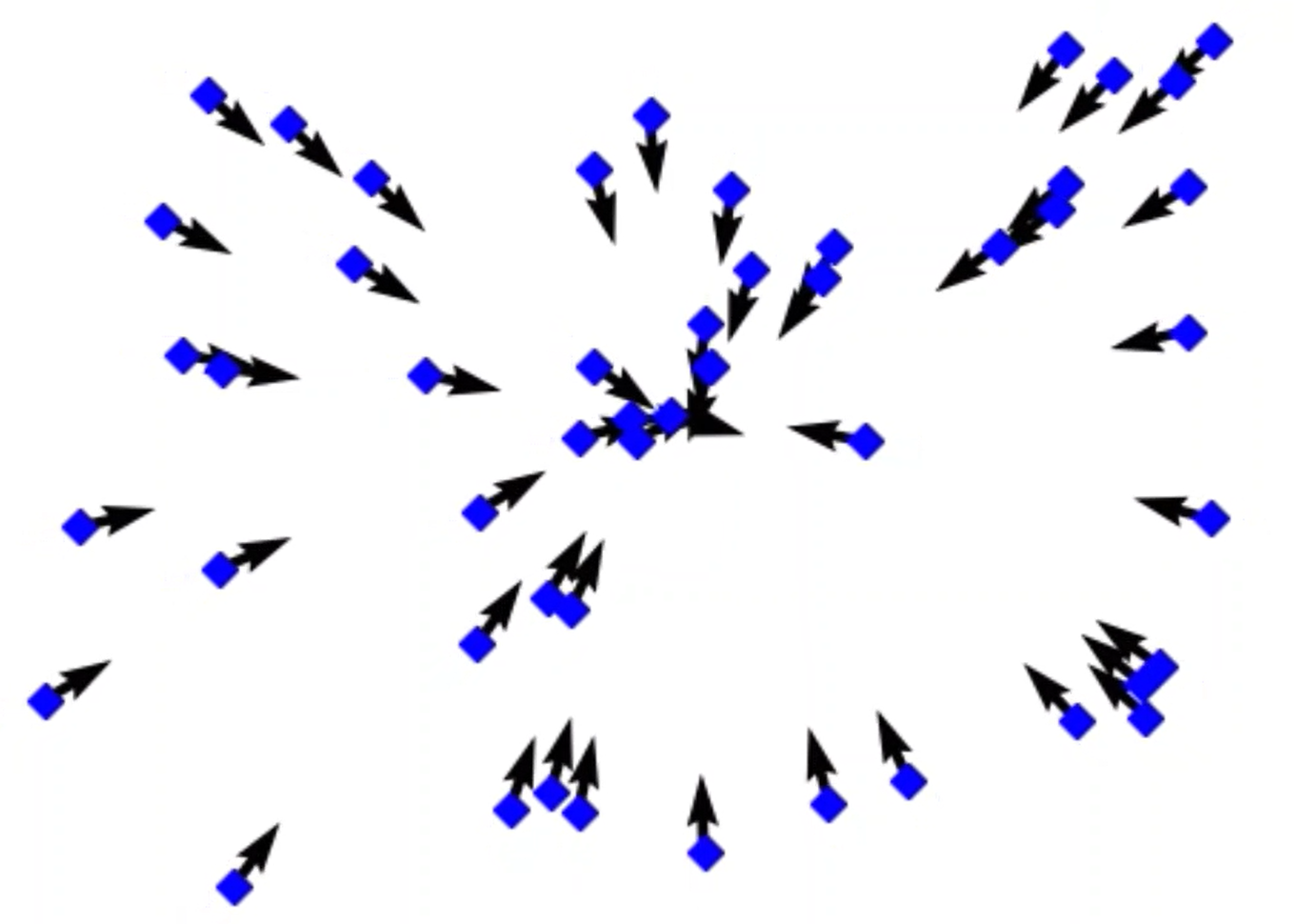
Tried to develop a novel monocular event based visual inertial odometry using self supervised learning, namely contrast maximization.
Engineered the training pipeline to run on multiple GPUs using Distributed Data Parallel (DDP) and deployed on SLURM cluster.
Formulated a factor graph based backend using IMU preintegration and neural lie algebra constraints optimized by iSAM2 using GTSAM.
|

|
Research Assistant, 2022-2023 Paper / Code Developed a model zoo of lightweight architectures - LSTM, Modified Segformer Vision Transformer and CNNs for real-time pure visionbased obstacle avoidance, enabling the drone to autonomously navigate through dynamic obstacle fields at speeds of up to 7 m/s. [Paper] |
|
|
Guidance, Navigation and Controls Intern, 2021-2022 Developed Sense and Avoid System (SAA) pipeline for Agricultural UAV where implemented LIDAR point cloud processing, obstacle avoidance and developed mavlink based support interface for lower level control. I was also the main Controls engineer for Indoor drone where successfully brought position accuracy to 5 cm in extreme low light conditions. |
|
These are the list of both my recent university projects and personal projects. |

|
Code
• Used Error State Kalman Filter to optimally combine SE3Tracknet and Classical Method based Pose estimation reducing angular error by 39% on YCB Video Dataset.
|
|
Code
• This was a GTSAM learning Project! Formulated a factor graph using ICP based Odometry on Argo AI Driving Dataset.
|
|
Code Description under development... See the code readme for more info! |
|
Code [Not open sourced yet]
•Developed and implemented an Operational Space Controller (OSC) for a 5-linked planar biped robot, formulating the problem as an instantaneous quadratic program (QP) to optimize actuator inputs and achieve precise tracking of the center of mass, torso angle, and swing foot position for stable walking.
|
|
Code
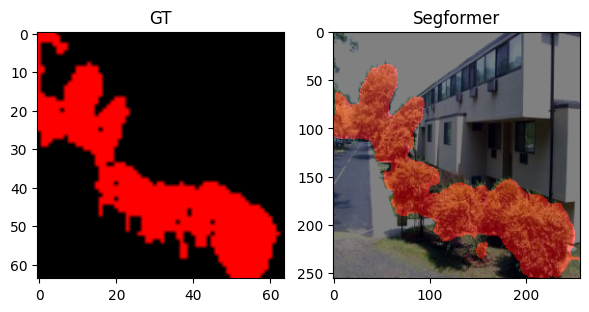
• Implemented Segformer's B0 architecture from scratch which mainly comprises of Attention Module,
MixFFN layer and a MLP decoder.
|
|
Code
• Depth estimation using Monocular Vision, by fusing information from multiple images of the scene
at different angles.
|
|
Code
• Applied Non Linear Bundle Adjustment using Horn Schunk Trick on the BAL dataset.
|
|
Report
The project aimed to achieve autonomous flight of a quadrotor in an obstacle map, given start and
end coordinates.
|
|
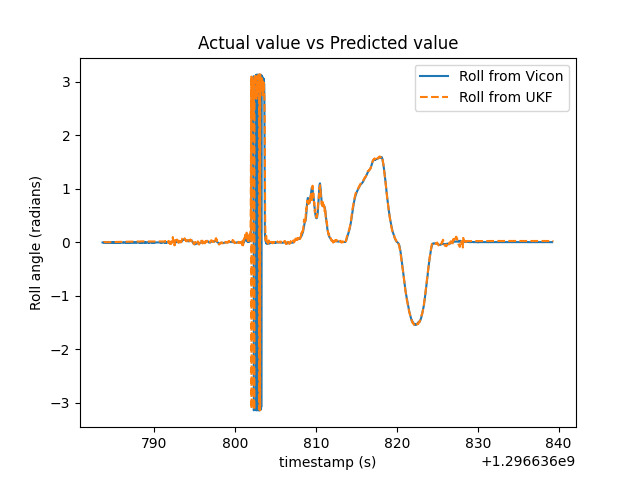
Code
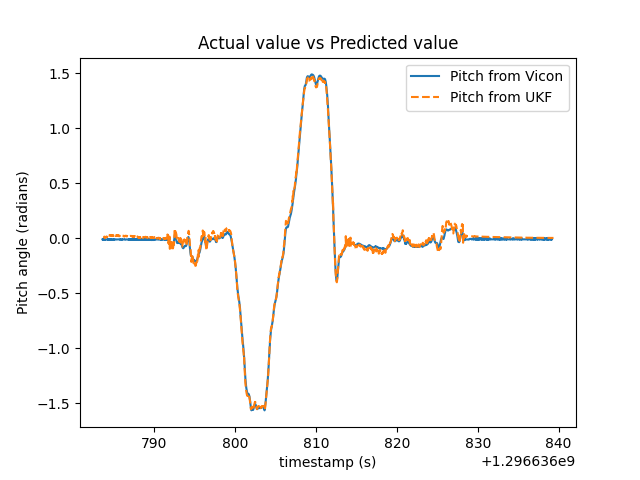
• Implemented a Quaternion based Unscented Kalman Filter(UKF) to track 3D orientation from
Gyroscope and Accelerometer data
|
|
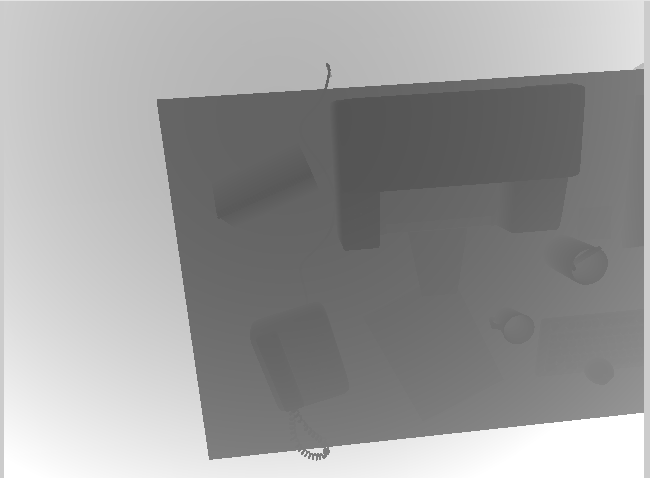
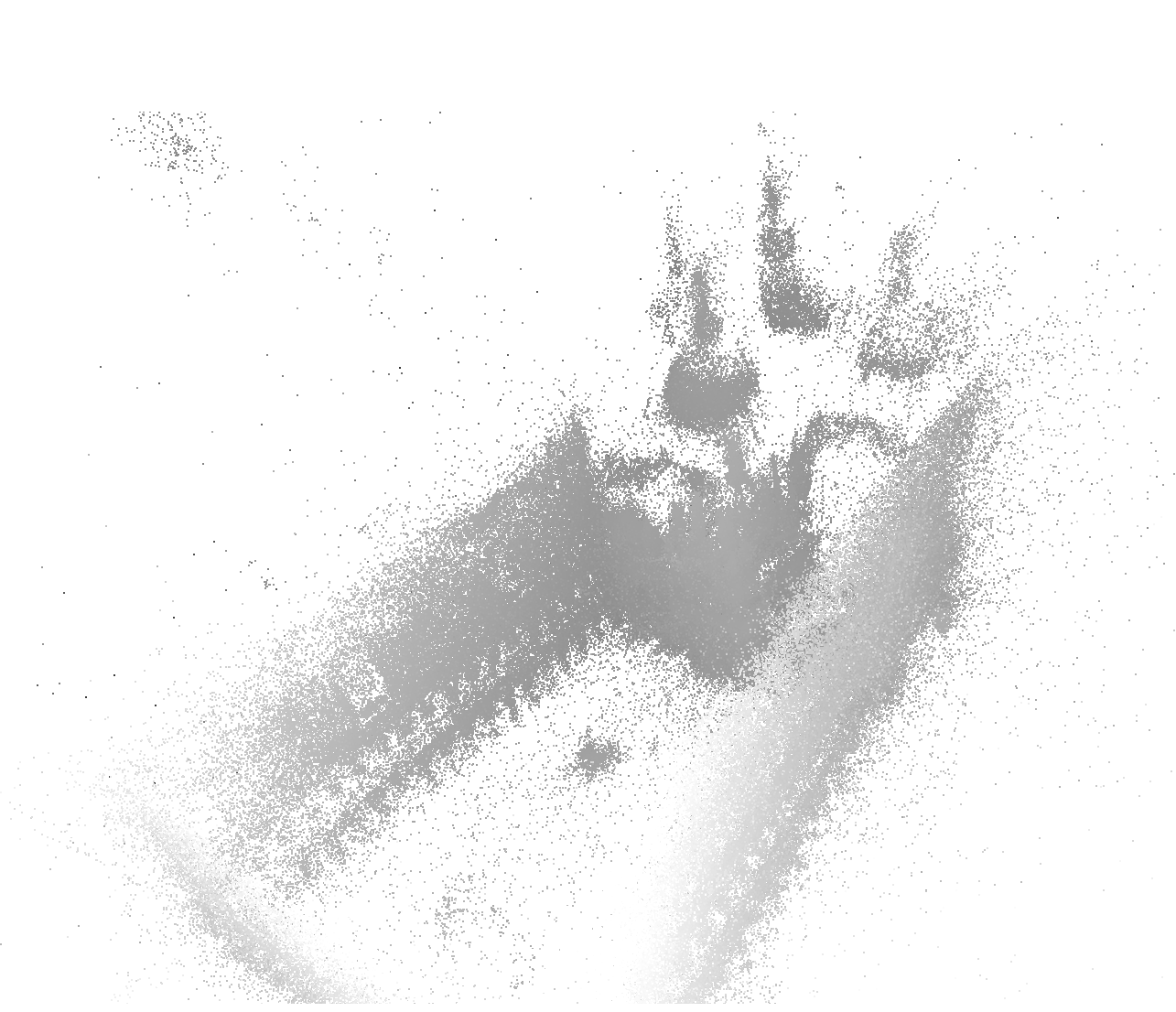
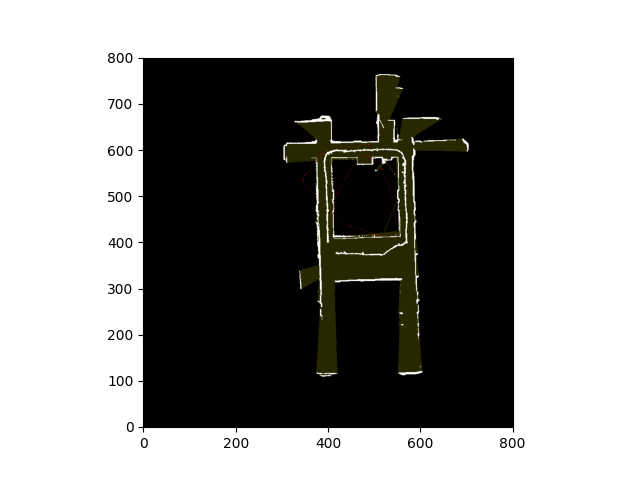
Lidar and odometry based SLAM on THOR Humanoid Robot, 2023 Code • Integrated the inertial orientation and odometry with a 2D LIDAR scan to build the occupancy grid map of the environment while localising the robot using a particle filter |
|
Techniques: Plane Sweep Stereo and Two View Stereo, 2023 Code • Implementation of two-view stereo and multi-view stereo algorithms for dense 3d reconstruction of a scene. |

|
Code
• Estimated Camera Pose using PnP/P3P correspondence algorithm (without OpenCV). Backprojected the
render mesh object to obtain an AR effect.
|
|
Fall Intro to Robotics Competition at University of Pennsylvania, 2022 Report / Code
• Detected April tag pose using ROS wrapper and then used an least square optimization approach to
refine the estimate.
|
|
Make an autonomous controller from scratch using the cheapest sensors available from Market. Paper / Video
• Developed a 12 state Kalman Filter that fuses MPU6050, BMP180 and Magnetometer, Neo6M GPS to get
a reliable state estimate.
|
|
Lightweight Simulator completely using Python standard library, 2020
• Developed a physics based graphical Simulator for differential drives and quadrotors from
scratch in python.
|
|
Code Implemented an adaptive control strategy using Energy Shaping to reach the Equilibirum region and then using Linear Quadratic Regulator to stabilize. |
|
I graduated as a Mechanical Engineer from Ahmedabad Univeristy, later joined Penn for Masters in Robotics. |

|
Masters in Robotics, 2022-2023 Specialization in Vision and Controls.
|
|
|
Bachelors of Technology in Mechanical Engineering, 2017-2021 Awarded Gold Medal and Award of Highest academic Excellence. |
|
Base layout of this webstite: jon barron |